Learn about the Chandra X-Ray Observatory's telescope system, science instruments, and spacecraft …
Learn about the Chandra X-Ray Observatory's telescope system, science instruments, and spacecraft system in this interactive activity adapted from NASA.
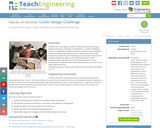
Working in engineering project teams, students evaluate sites for the construction of …
Working in engineering project teams, students evaluate sites for the construction of a pyramid. They base their decision on site features as provided by a surveyor's report; distance from the quarry, river and palace; and other factors they deem important to the project based on their team's values and priorities.
In this video segment, members of the ZOOM cast experiment by bending …
In this video segment, members of the ZOOM cast experiment by bending and folding sheets of paper into various shapes to see which shape will support the weight of a heavy book.
As a class, students use a low-cost air quality monitor (a rentable …
As a class, students use a low-cost air quality monitor (a rentable “Pod”) to measure the emissions from different vehicles. By applying the knowledge about combustion chemistry that they gain during the pre-activity reading (or lecture presentation, alternatively), students predict how the emissions from various vehicles will differ in terms of pollutants (CO2, VOCs and NO2), and explain why. After data collection, students examine the time series plots as a class—a chance to interpret the results and compare them to their predictions. Short online videos and a current event article help to highlight the real-world necessity of understanding and improving vehicle emissions. Numerous student handouts are provided. The activity content may be presented independently of its unit and without using an air quality monitor by analyzing provided sample data.
Students learn and apply concepts in thermodynamics and energy—mainly convection, conduction, and …
Students learn and apply concepts in thermodynamics and energy—mainly convection, conduction, and radiation— to solve a challenge. This is accomplished by splitting students into teams and having them follow the engineering design process to design and build a small insulated box, with the goal of keeping an ice cube and a Popsicle from melting. Students are given a short traditional lecture to help familiarize them with the basic rules of thermodynamics and an introduction to materials science while they continue to monitor the ice within their team’s box.
You are preparing your family’s emergency kits in case there is a …
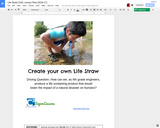
You are preparing your family’s emergency kits in case there is a need to leave your home quickly, or stay in your home without electricity or water. You need to be able to create an emergency supply kit that includes a lightweight water filtration device that is low cost. This will provide you with clean water regardless of your water source.
In this project, you will gain knowledge of natural disaster preparedness through the Red Cross Pillowcase project. You will research and experiment with the water cycle to learn how water is naturally filtered. You will then design and build a water filtration device that could filter water in an emergency situation.
In this interactive activity from the Building Big Web site, investigate dams …
In this interactive activity from the Building Big Web site, investigate dams in distress and decide if they should be repaired, removed, or left alone.
In this lesson, students learn that sound is energy and has the …
In this lesson, students learn that sound is energy and has the ability to do work. Students discover that sound is produced by a vibration and they observe soundwaves and how they travel through mediums. They understand that sound can be absorbed, reflected or transmitted. Through associated activities, videos and a PowerPoint presentation led by the teacher, students further their exploration of sound through discussions in order to build background knowledge.
Students are introduced to the biomechanical characteristics of helmets, and are challenged …
Students are introduced to the biomechanical characteristics of helmets, and are challenged to incorporate them into designs for helmets used for various applications. By doing this, they come to understand the role of enginering associated with saftey products. The use of bicycle helmets helps to protect the brain and neck in the event of a crash. To do this effectively, helmets must have some sort of crushable material to absorb the collision forces and a strap system to make sure the protection stays in place. The exact design of a helmet depends on the needs and specifications of the user.
Students are presented with the following challenge: their new school is under …
Students are presented with the following challenge: their new school is under construction and the architect accidentally put the music room next to the library. Students need to design a room that will absorb the most amount of sound so that the music does not disturb the library. Students use a box as a proxy for the room need to create a design that will decrease the sound that is coming from the outside of the box. To evaluate this challenge, students use a speaker within the box and a decibel meter outside the box to measure the effectiveness of their design.
Welcome to 2.007! This course is a first subject in engineering design. …
Welcome to 2.007! This course is a first subject in engineering design. With your help, this course will be a great learning experience exposing you to interesting material, challenging you to think deeply, and providing skills useful in professional practice. A major element of the course is design of a robot to participate in a challenge that changes from year to year. This year, the theme is cleaning up the planet as inspired by the movie Wall-E. From its beginnings in 1970, the 2.007 final project competition has grown into an Olympics of engineering. See this MIT News story for more background, a photo gallery, and videos about this course.
Welcome to 2.007! This course is a first subject in engineering design. …
Welcome to 2.007! This course is a first subject in engineering design. With your help, this course will be a great learning experience exposing you to interesting material, challenging you to think deeply, and providing skills useful in professional practice. A major element of the course is design of a robot to participate in a challenge that changes from year to year. This year, the theme is cleaning up the planet as inspired by the movie Wall-E.
Emphasizing the design, build, and test steps of the engineering design process, …
Emphasizing the design, build, and test steps of the engineering design process, groups create a ping-pong paddle. After building their paddle, students conduct tests and compare their design to a store-bought paddle and use a Venn diagram to organize their information. Based on their results, students write product reviews for their paddle. This project allows students to build and test a design, iterate upon that design as well as explore how data analysis of a product works.
Students learn about the types of possible loads, how to calculate ultimate …
Students learn about the types of possible loads, how to calculate ultimate load combinations, and investigate the different sizes for the beams (girders) and columns (piers) of simple bridge design. Students learn the steps that engineers use to design bridges: understanding the problem, determining the potential bridge loads, calculating the highest possible load, and calculating the amount of material needed to resist the loads.
In this video segment adapted from ZOOM, cast members design and build …
In this video segment adapted from ZOOM, cast members design and build door alarms using a variety of materials, including aluminum foil, batteries, and buzzers.
Students explore the concept of optical character recognition (OCR) in a problem-solving …
Students explore the concept of optical character recognition (OCR) in a problem-solving environment. They research OCR and OCR techniques and then apply those methods to the design challenge by developing algorithms capable of correctly "reading" a number on a typical high school sports scoreboard. Students use the structure of the engineering design process to guide them to develop successful algorithms. In the associated activity, student groups implement, test and revise their algorithms. This software design lesson/activity set is designed to be part of a Java programming class.
In this interactive activity from the Building Big Web site, think like …
In this interactive activity from the Building Big Web site, think like an engineer and use your knowledge of dome design to match the right type of dome to the right location in a fictitious city.
In this video adapted from ANDRILL, find out how geoscientists get through …
In this video adapted from ANDRILL, find out how geoscientists get through more than a dozen football fields of ice and water in order to study the rock and sediment beneath Antarctica.
No restrictions on your remixing, redistributing, or making derivative works. Give credit to the author, as required.
Your remixing, redistributing, or making derivatives works comes with some restrictions, including how it is shared.
Your redistributing comes with some restrictions. Do not remix or make derivative works.
Most restrictive license type. Prohibits most uses, sharing, and any changes.
Copyrighted materials, available under Fair Use and the TEACH Act for US-based educators, or other custom arrangements. Go to the resource provider to see their individual restrictions.